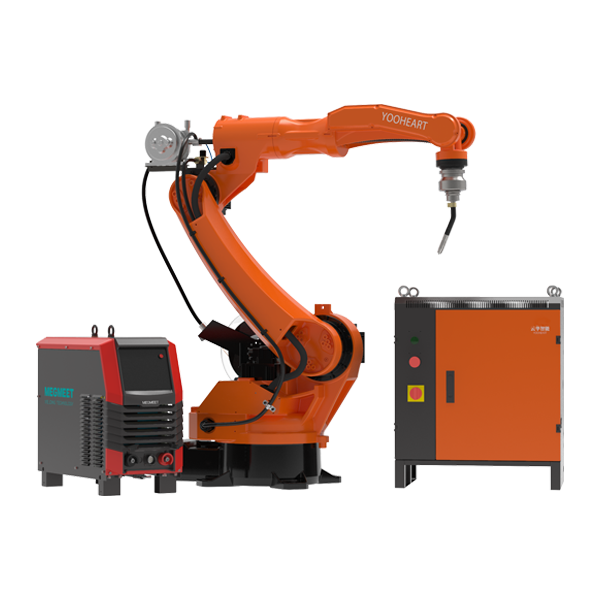
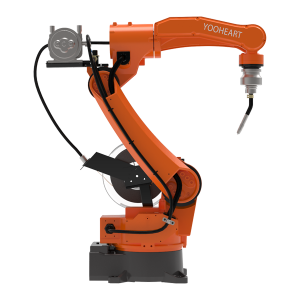
2000mm Megmeet Ehave CM 350AR bilen kebşirleýji robot

Haryt bilen tanyşlyk
“Yooheart” robot üpjünçiligirobot kebşirleýji gollar yzygiderli we ýokary hilli kebşirlemek üçin birkemsiz gaýtalanmagy üpjün edip biler.Biziňkikebşirlemek üçin robotlar netijeliligini ýokarlandyrmaga we sikl wagtyny azaltmaga kömek edýär.Ulanmakawtomatlaşdyrylan kebşirleýiş ulgamlary we amallary gönüden-göni zähmet çykdajylaryny azaltmaga we materiallary tygşytlamaga mümkinçilik berýär.Honyen sazlap bilerrobot kebşirleýiş ulgamlaryher bir müşderiniň dürli talaplaryna laýyk gelmek.Bizde barkebşirleýiş robotlary, ark kebşirleýji robotlar, weCNC kebşirleýji robotlar bularyň hemmesi ISO we CE kepillendirilen.“Yooheart” -yň ýokary hilli kebşirleýiş gollaryny saýlaň we önümçilik işleriňiziň netijeliligini üpjün ederis.
Tehnologiýa parametrleri
| Ok | Loadüklemek | Gaýtalama | Potensial | Daşky gurşaw | Agramy | Gurnama |
| 6 | 6KG | ± 0.08mm | 3.7KVA | 0-45 ℃ 20-80% RH (Forsting ýok) | 280KG | / Er / götermek |
| Hereket aralygy J1 | J2 | J3 | J4 | J5 | J6 | Goluň uzynlygy |
| ± 165º | + 80º ~ -150º | + 125º ~ -75º | ± 170º | '+ 115º ~ -140º | ± 220º | 2000mm |
| Iň ýokary tizlik J1 | J2 | J3 | J4 | J5 | J6 | |
| 145º / s | 133º / s | 145º / s | 217º / s | 172º / s | 500º / s |
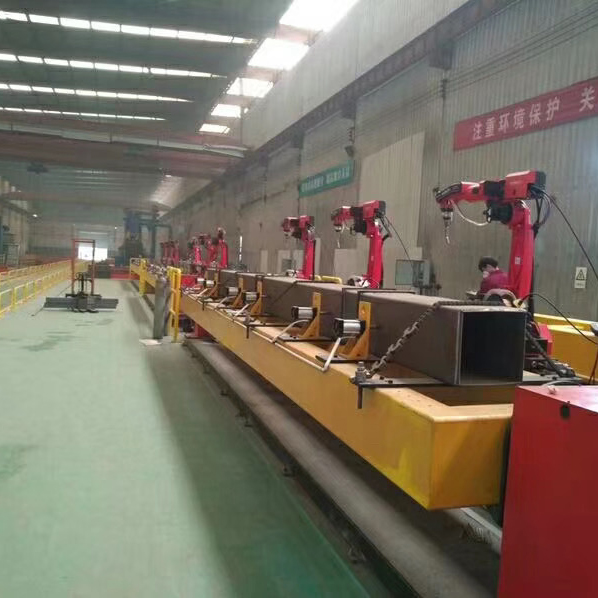
Senagat robotlary bilen kebşirlemegiň hili we goýmalary
Robotly kebşirleýiş kebşirleýiş tikişi
Senagat robot amaly sergisi
Esasy konfigurasiýa
Highhli ýokary hilli önümler

Robot bedeni
1, HY1006A-200 ykjam dizaýn, ýeňil, kiçi göwrümli, uly göwrümli we Mig kebşirlemek roboty üçin ýörite ulanylýar.
2, kebşirleýiş haltalarynyň hemmesini, aňsat programmirlemegi we oňat öndürijiligi öz içine alýar.
3, presokary presikasiýa we ýere, potoloklara we diwara oturdyň
Megmeet Ehave CM 350AR
1, Doly tok we pes ýaýradyjylarda durnukly ýaý, dürli kebşirleýiş amallary üçin amatly;
2, ýokary konsentrirlenen ýaý we güýçli aralaşmak, ýylylyk girişindäki beýleki maşynlardan 20% az;
3, Ajaýyp Gap köprüsi we sim uzaldylyşynda az duýgurlyk;
4, Kebşirleýiş parametrlerini gulplamak we funksiýany giňeltmek, has köp konfigurasiýa autsorsing etmezden dolandyryş panelini çalt gurup bolýar;


Kebşirleýiş fakeli
1, Kebşirleýiş fakeliniň ululygy uludyr;
2, fakeliň boýnuny üýtgedip bolýar
3, Adaty fakeliň çaknyşmaga garşy enjamy bar;
4, Fakeliň boýnunyň dürli burçuny sazlaň
Sim iýmitlendiriji
1, Iş ýeriniň öndürijiligi we netijeliligi;
2, Kabeliň uzynlygynyň öwezini dolmak, aşa ygtybarlylyk;
3, Takometr dolandyryşy bilen agyr ýükli hereketlendiriji

DETAIL SHOW
Highhli ýokary hilli önümler
Iň ýokary takyklyk
Ykjam dizaýn
Hytaýyň ähli bölekleri


Iň ýokary hil
Çeýe konfigurasiýa
Durnukly öndürijilik
Ykjam
Gurluşy ýönekeý
Saklamak aňsat
Has tygşytly


Iň ýokary takyklyk
Speedokary tizlik we durnuklylyk ýoly kebşirlemegiň takyk çözgütleri
Näme üçin bizi saýlaýar?
öndürijilik hil prosesi


KERTIFIKASI .A
Resmi kepillendirilen hil kepilligi
FQA
S: Robot biri-biri bilen nädip aragatnaşyk gurup biler?
A. Iki robot efir tor we 485 arkaly biri-biri bilen aragatnaşyk gurup bilýär. Mugallym gulagyndan gönüden-göni saýlap bilersiňiz, bu gowşurylmazdan ozal ulgamda ýazylypdyr.
S: Iş stansiýasy üçin fakel arassa stansiýasyny birleşdirersiňizmi?
J: Bu islege bagly zat, zerur bolsa, size düzüp bileris.
S: Iş stansiýaňyzyň gowydygyny ýa-da ýokdugyny nädip bilerin?
J: Zawodyňyza baryp görmek we iş stansiýasyny özüňiz synap görmek gowy.Aslynda bu ýol siziň we biziň üçin peýdaly, sizi has gowy tanaýarys we bizi has gowy tanaýarsyňyz.
S: Işçilerim okuw üçin siziň kompaniýaňyzda galyp bilermi?
J: Gowy, zawodymyzda okuw mugt, diňe öz ýaşaýyş jaýyňyzy tölemeli.
S: Ilkinji iş stansiýasy üçin maňa aýratyn baha berersiňizmi?
A. Bu hakda gürleşip bileris.