
YH1165B-315 Uly iş bölegi palletizasiýa we material bilen işlemek üçin agyr ýükli robot



Giriş
TheYH1165B-315agyr materiallary işlemek we palletizasiýa etmek üçin niýetlenen ýokary öndürijilikli 4 okly senagat roboty. Kerpiç, nebit deprekleri, haltalar we sandyklar ýaly uly we uly iş böleklerini dolandyrmak üçin döredilen bu robot, önümçilik şertlerini talap etmekde netijeliligi ýokarlandyrmak üçin berk ýük göterijiligini, giňelmegini we takyklygyny birleşdirýär. Iň köp ýük götermek bilen165 kgwe goluň uzynlygy3150 mm, YH1165B-315 çalt, durnukly we gaýtalanýan amallary talap edýän ssenariýalarda ajaýyp. Onuň modul dizaýny, öndürijiligi we ygtybarlylygy gözleýän pudaklar üçin amatly çözgüt bolup, aňsat gurnamagy we tehniki hyzmaty üpjün edýär.

Tionazgy: YH1165B-315 senagat desgasyndaky nebit depreklerini netijeli palletleşdirýär.
Esasy aýratynlyklary
- Agyr ýük kuwwaty
Loadük göterijilerine çenli işlemäge ukyply165 kg, YH1165B-315 agyr senagat önümleri üçin niýetlenendir. Onuň berkidilen bogunlary we optimal mehaniki gurluşy, hatda iň ýokary ýükde-de durnuklylygy üpjün edýär. - Giňeldilen ýetiş we çeýeligi
A bilenGoluň uzynlygy 3150 mmwe 4 okly hereket, robot takyklygy saklamak bilen uly iş ýerlerini öz içine alýan giň iş aralygyna ýetýär. P-nokat (gural merkezi nokady) hereket diapazony dik we keseligine berkitmek meselelerini bökdençsiz ýerleşdirmek üçin niýetlenendir. - Speokary tizlikli durnuklylyk
Ösen hereketi dolandyrmak algoritmleri we optimal bilelikdäki mehanizmler mümkinçilik berýär15–20% has çalt aýlaw wagtyöňki modeller bilen deňeşdirilende. Bu täzelenme, takyklyga zyýan bermezden çalt ýerine ýetirilmegini üpjün edýär. - Aňsat hyzmat etmek
Robotyň modully bölekleri we ýönekeýleşdirilen simler tehniki hyzmat wagtynda iş wagty azaldýar. Kritiki böleklere aňsatlyk bilen girip bolýar, hyzmatdaky bökdençlikleri azaldýar. - Çydamly gurluşyk
Senagat derejeli materiallar bilen gurlan YH1165B-315, tozan, yrgyldy we temperaturanyň üýtgemegi ýaly agyr şertlere çydamly.

Tionazgy: YH1165B-315 haltalary täsirli palletirleýär.
Tehniki aýratynlyklar
| Parametr | Gymmatlyk |
| Loadük göterijilik ukyby | 165 kg (iň ýokary) |
| Goluň uzynlygy | 3150 mm |
| Baltalar | 4 ok |
| Gaýtalama | ± 0.03 mm |
| Hereket aralygy (P-nokat) | Lz: 500–1100 mm (dik) |
| Lxy: 500–1100 mm (keseligine) | |
| Tizligi ýokarlandyrmak | Öňkülerden 15–20% çalt |
| Maslahat berilýän programmalar | Palletizasiýa, ýasamak, gaýtadan işlemek, gurnamak |
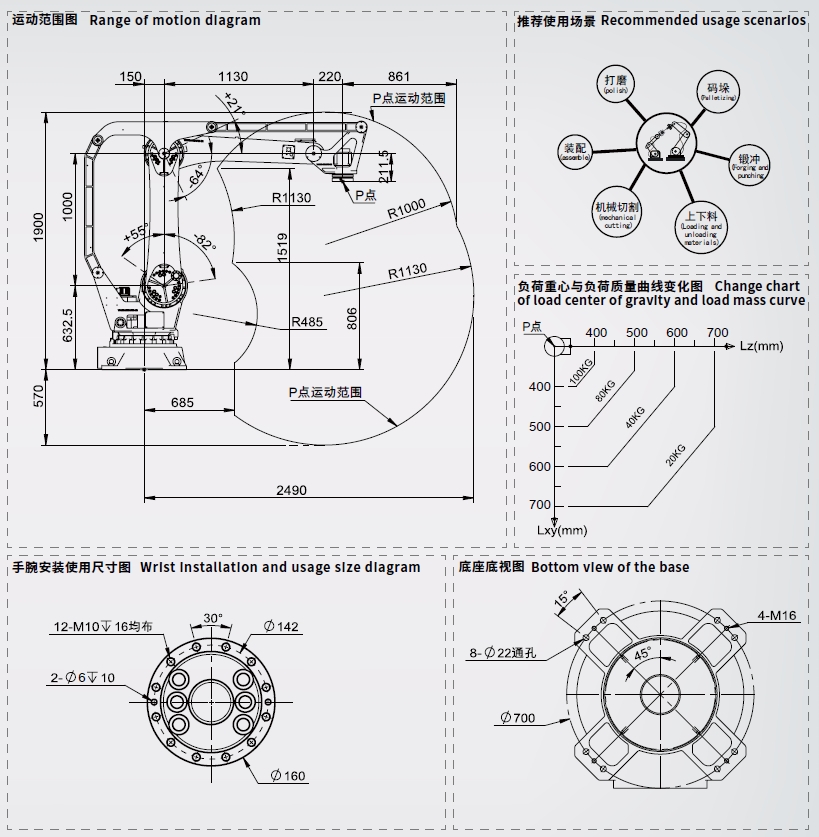
Tionazgy: Dik (Lz) we keseligine (Lxy) örtügi görkezýän P-nokat hereket diapazony.
Goýmalar
YH1165B-315 agyr material işlemegi talap edýän pudaklarda köptaraplydyr. Esasy ulanylyş ýagdaýlary şulary öz içine alýar:
- Köp önümleriň paletizasiýasy
Ammarlarda ýa-da önümçilik liniýalarynda kerpiçleri, haltalary ýa-da sandyklary netijeli ýerleşdiriň. Robotyň giňelmegi we ýük göterijiligi köp gatlaklary takyklyk bilen dolandyrmaga mümkinçilik berýär. - Galplaşdyrmak we urmak
Galp presleri ýa-da zarba urýan maşynlaryň arasynda agyr metal böleklerini daşap, ýokary täsirli şertlere garşy duruň. - Işlemek we gurnamak
Uly bölekleri CNC maşynlaryna ýükläň / düşüriň ýa-da awtoulag ýa-da maşyn önümçiliginde agyr komponentleri ýygnaň. - Deprek we barrel bilen işlemek
Nebit depreklerini, himiki çelekleri ýa-da şuňa meňzeş silindr görnüşli zatlary ygtybarly galdyryň we ýerleşdiriň.
Tionazgy: YH1165B-316 logistika ammarynda sandyklary gaýtadan işlemek.
Öndürijilik gowulandyrmalary
Döwrebaplaşdyrylan YH1165B-315 model aýratynlyklary:
- 15–20% has çalt aýlaw wagtygüýçlendirilen sero hereketlendirijileri we hereket algoritmleri sebäpli.
- Has ýumşak amallar üçin titremäni gowulandyrmak.
- Energiýa tygşytlaýjy komponentler, energiýa sarp edilişini 10% -e çenli azaldýar.
Näme üçin YH1165B-315 saýlamaly?
- Ygtybarlylyk: 10,000 sagatdan gowrak iş bilen hakyky dünýä ssenarilerinde synag edildi.
- Özbaşdaklaşdyrma: Aýratyn meseleler üçin goşmaça tutawaçlar, datçikler we programma üpjünçiligi.
- Goldaw: Giňişleýin tehniki resminamalar we 24/7 müşderi hyzmaty.
Goşmaça maglumat soraň
Agyrlyk grafikleriniň jikme-jik ýük merkezi, esasy gurnama diagrammalary ýa-da ýöriteleşdirilen çözgütler üçin tehniki toparymyz bilen habarlaşyň. "*" Bilen bellenen önümler goşmaça resminamalary talap edýär.
Netije
YH1165B-315 senagat roboty, agyr materiallary gaýtadan işlemegiň netijeliligini kesgitleýär. Güýç, tizlik we uýgunlaşma utgaşmasy, amallary tertipleşdirmegi we zähmet çykdajylaryny azaltmagy maksat edinýän pudaklar üçin zerur bolýar. Bu robotyň iş tertibini nädip üýtgedip biljekdigini öwrenmek üçin şu gün biziň bilen habarlaşyň.






