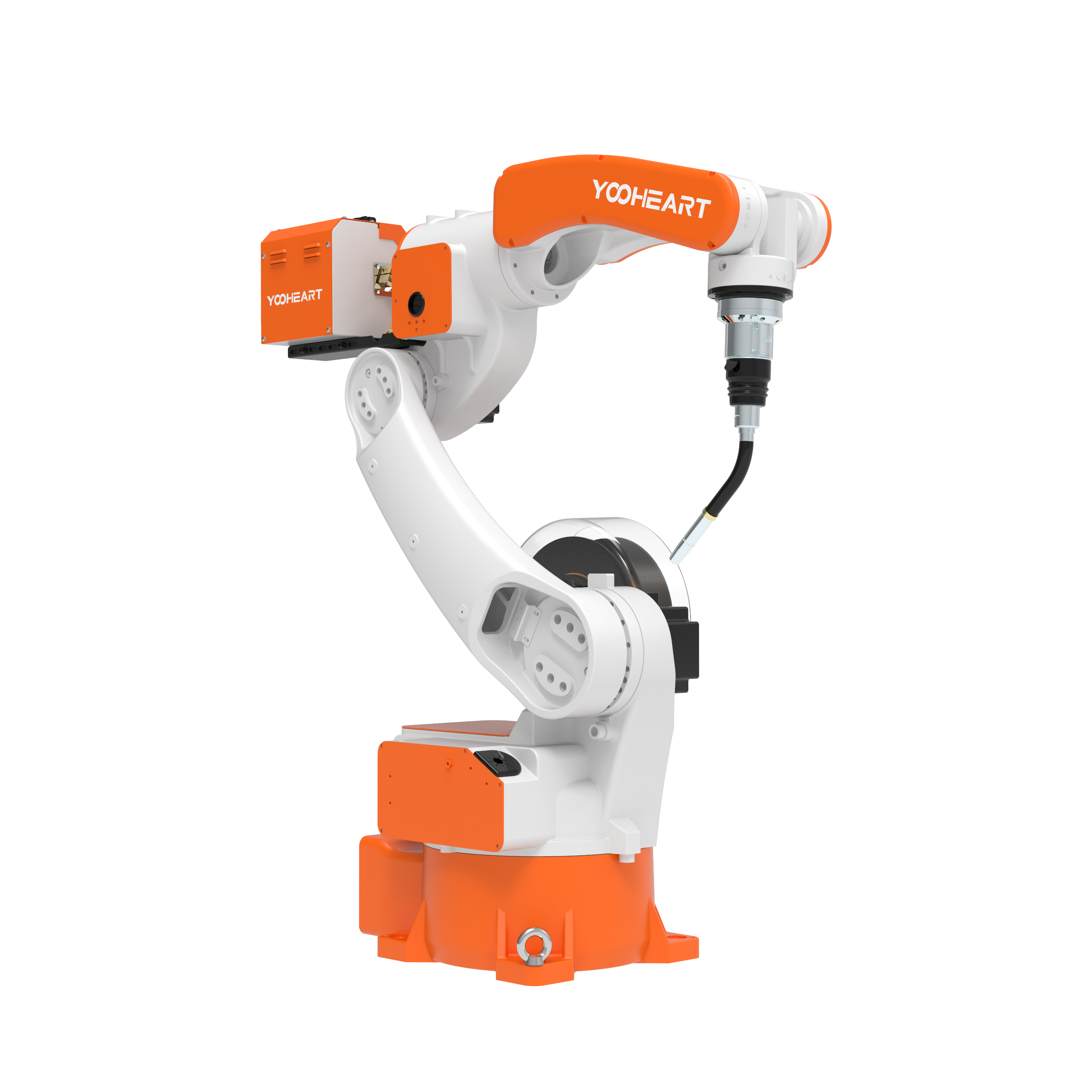
Awtoulag bölekleri ark kebşirleme roboty

Önümiň tanyşdyrylyşy
Häzirki zaman tehnologiýa bilen işleýän dünýäde robotlar kebşirlemek üçin ulanylýanlaryň ýarysyna golaýy bilen önümçilikde möhüm rol oýnaýar. Bularyň köpüsikebşirlemek robotlary awtoulag pudagynda ulanylýar. Soňky 30 ýylda awtoulag kebşirleýiş robotlary pudagy üýtgetmek bilen meşgullandy. Has ygtybarly, tygşytly we täsirli bolanda awtoulag gurnama liniýalaryny has çaltlaşdyrdylar. Awtoulag robotlarynyň awtoulag pudagyny üýtgetmekde birinji orunda durmagynyň esasy sebäpleri.
häzirki wagtda bazarda bar bolan iň köpugurly we täsirli robot awtomatlaşdyrylan kebşirleýiş öýjüklerini dizaýn edýäris. Robot kebşirleýiş ulgamlarymyz bilen, awtoulag öndürijilerine önümiň hiliniň we yzygiderliliginiň iň ýokary derejesini saklamak bilen bir hatarda, zerur bolan müňlerçe bölekleri has ýokary, yzygiderli tizlikde öndürip biljek ygtybarly çözgüt bilen üpjün edýäris.
Tehnologiýa parametrleri
| Ok | Loadük | Gaýtalama | Potensial | Daşky gurşaw | Agram | Gurnama |
| 6 | 6KG | ± 0.08mm | 3.7KVA | 0-45 ℃ 20-80% RH (Forsting ýok) | 170KG | / Er / götermek |
| Hereket aralygy J1 | J2 | J3 | J4 | J5 | J6 | |
| ± 165º | '+ 80º ~ -150º | '+ 125º ~ -75º | ± 170º | '+ 115º ~ -140º | ± 220º | |
| Iň ýokary tizlik J1 | J2 | J3 | J4 | J5 | J6 | |
| 145º / s | 133º / s | 145º / s | 217º / s | 172º / s | 500º / s |
Esasy bölekler
Highhli ýokary hilli önümler

RV reduktor
1.
2. Üç esasy gurluş böleklerine bölmek bolar: guty korpusy, gurçuk dişli, podşipnik we şah kombinasiýasy.
3. RV reduktor geçirijisi durnukly, yrgyldy, täsir we ses az, peseliş tizligi uly,
Servo Motor
100-den gowrak esasy garaşsyz intellektual eýeçilik hukugy bolan Ruking, dünýäniň 50-den gowrak sebitini öz içine alýan 100-den gowrak hyzmatdaşy bar. Topar dünýä derejesindäki R&D ulgamyny kabul edýär we ISO9000 we ISO / TS16949 hil ulgamyna eýe.


Dolandyryş ulgamy
LNC Aisa-da iň ýokary 1 dolandyryş ulgamy markasy bolup, gurnama, synag, paket, materiallary gaýtadan işlemek we gaýtadan işlemek ýaly dürli önümçilik goşundylaryndan dürli talaplary kanagatlandyrmak üçin gantry, SCARA, delta we 6 bilelikdäki robotlaryň ajaýyp dolandyryş tehnologiýalaryna eýedir. Hususylaşdyrma talaplaryny kanagatlandyrmak üçin standart önümleriň doly toplumyny we integrasiýa hyzmatyny hödürleýäris.
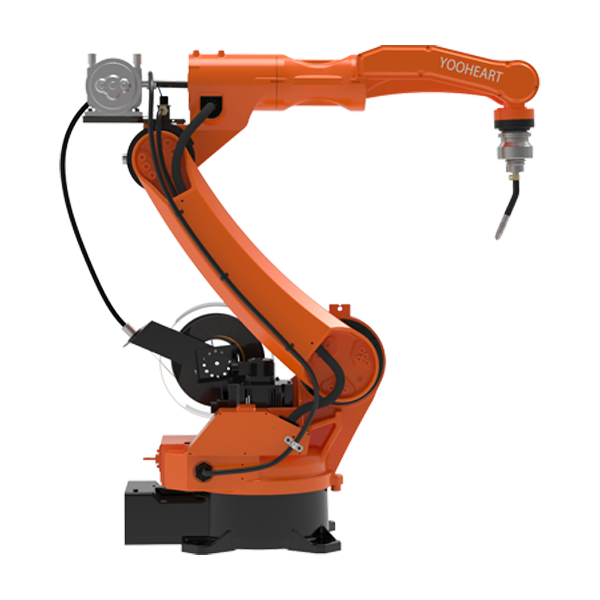
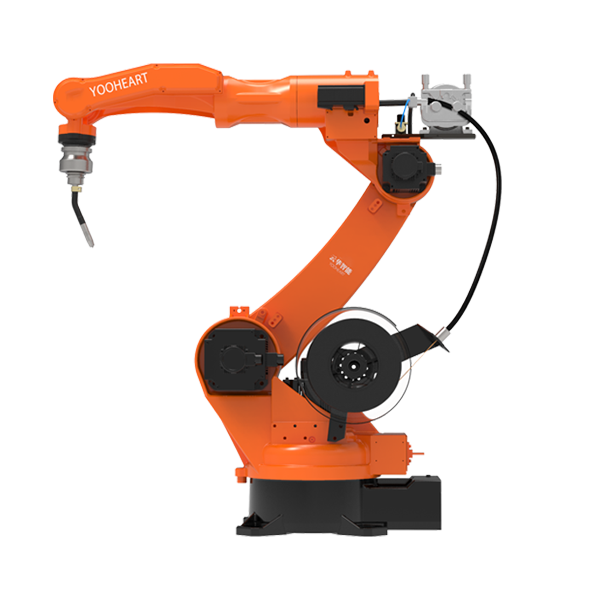
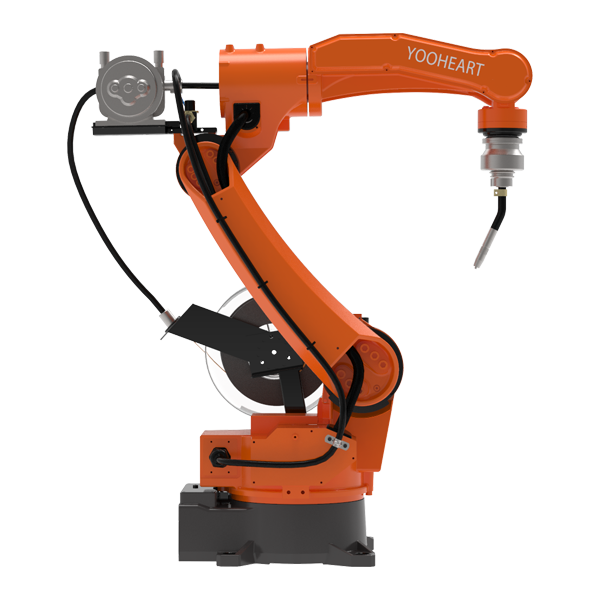
Robot bedeni
“Yooheart Robot” ähli gelýän materiallary barlar we takyklyk talaplary 0.01mm. Diňe talaplara laýyk gelýän robot beden esbaplary gurmak üçin indiki baglanyşyga girer.

DETAIL SHOW
Highhli ýokary hilli önümler
Iň ýokary takyklyk
Çalt herekete jogap
Bu dereje ýurtda öňde barýar


Qualityokary hil
Highokary konfigurasiýany kabul ediň
Kuwwat kombinasiýasy
“Lightweght” beden dizaýny
Ykjam
Gurluşy ýönekeý
Saklamak aňsat
Has tygşytly


Iň ýokary takyklyk
Speedokary tizlik we durnuklylyk ýoly kebşirlemegiň takyk çözgütleri
Näme üçin bizi saýlaýar?
öndürijiligiň hili


KERTIFIKASI .A
Resmi kepillendirilen hil kepilligi
FQA
S: “Yooheart” roboty näçe daşarky ok goşup biler?
A. Häzirki wagtda “Yooheart” roboty robot bilen hyzmatdaşlyk edip bilýän robot üçin ýene 3 daşarky ok goşup biler. .Agny, 7 ok, 8 ok we 9 ok bilen standart robot iş stansiýasy bar.
S: Robota has köp ok goşmak islesek, başga ýol barmy?
A. PLC bilýärsiňizmi? Muny bilýän bolsaňyz, robotymyz PLC bilen habarlaşyp biler we soňra daşarky oky dolandyrmak üçin PLC-e signal berip biler. Şeýlelik bilen, 10 ýa-da has köp daşarky ok goşup bilersiňiz. Bu ýoluň ýekeje ýetmezçiligi, daşarky okuň robot bilen işleşip bilmezligi.
S: PLC robot bilen nähili aragatnaşyk saklaýar?
A. Dolandyryş kabinetinde i / O tagtamyz bar, 20 çykyş porty we 20 giriş porty bar, PLC I / O tagtasyny birleşdirer we robotdan signal alar.
S: Has köp I / o port goşup bilerismi?
A. Diňe kebşirlemek üçin bu I / O porty ýeterlikdir, has köp gerek bolsa, I / O giňelýän tagtamyz bar. Anotherene 20 giriş we çykyş goşup bilersiňiz.
S: Haýsy PLC ulanýarsyňyz?
J: Indi “Mitsubishi” we “Siemens” -i we käbir beýleki markalary birleşdirip bileris.