Robot Mig kebşirlemek ---- Köçe çyra polýusyny kebşirlemek ergini
Indeks
1. Iş bölegi barada maglumat
2. Robot kebşirleme çözgüdi syn
3. Robot bilen kebşirlemegiň çözgüdi
4. Robot çözgüdi enjamlaryň konfigurasiýasy
5. Esasy wezipe 6. Enjamlaryň tanyşdyrylyşy
7. Gurmak, işe girizmek we okuw
8. Barlamak we kabul etmek
9. Daşky gurşawyň talaplary
10. Kepillik we satuwdan soň hyzmat
11. Goşmaça resminamalar
Robotly kebşirleme programmasy wideo
1, Iş eseri barada maglumat
-Kebşirleýiş siminiň diametri: Ф1.2mm
-Kebşirleýiş prosesi: gaz bilen goralýan kebşirlemek / Mig kebşirlemek
-Kebşirleme tikiş görnüşi: göni çyzyk görnüşi, Tegelek görnüşi
-Gorag gazy:99% CO2
-Işleýiş usuly: el bilen ýüklemek we düşürmek, robot awtomatiki kebşirlemek
-Ingalňyşlyk:≤ 0.5mm
-Plastinany arassalamak :kebşirde metal şöhlesini görmek bolýar weiki tarapynda kebşirlenen tikişiň iki esse beýikliginde
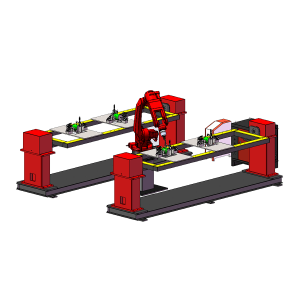
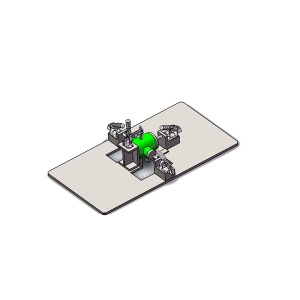
2, Robotly kebşirleme çözgüdi
Işiň netijeliligini ýokarlandyrmak üçin, işiň hakyky ýagdaýyna görä, Honyen zawody kebşirleýiş robot iş stansiýasyny üpjün eder, ony dürli önümler bilen utgaşdyrmak üçin dürli gurallar bilen çalşyp bolar.Iş stansiýasy robot modelinden durýar: HY1006A-145 kebşirleýji robot, kebşirleýiş güýji çeşmesi, robot üçin ýörite kebşirleýiş fakeli, elektrik dolandyryş kabineti we düwmeler , suw sowadyjy çiller, goşa iş stansiýasy, gurallar, howpsuzlyk gorag diwary (islege görä) we başgalar bölekleri.
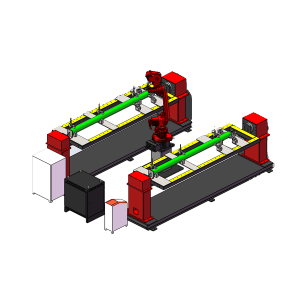
3 ig Mig kebşirleme robot iş stansiýasynyň ýerleşişi
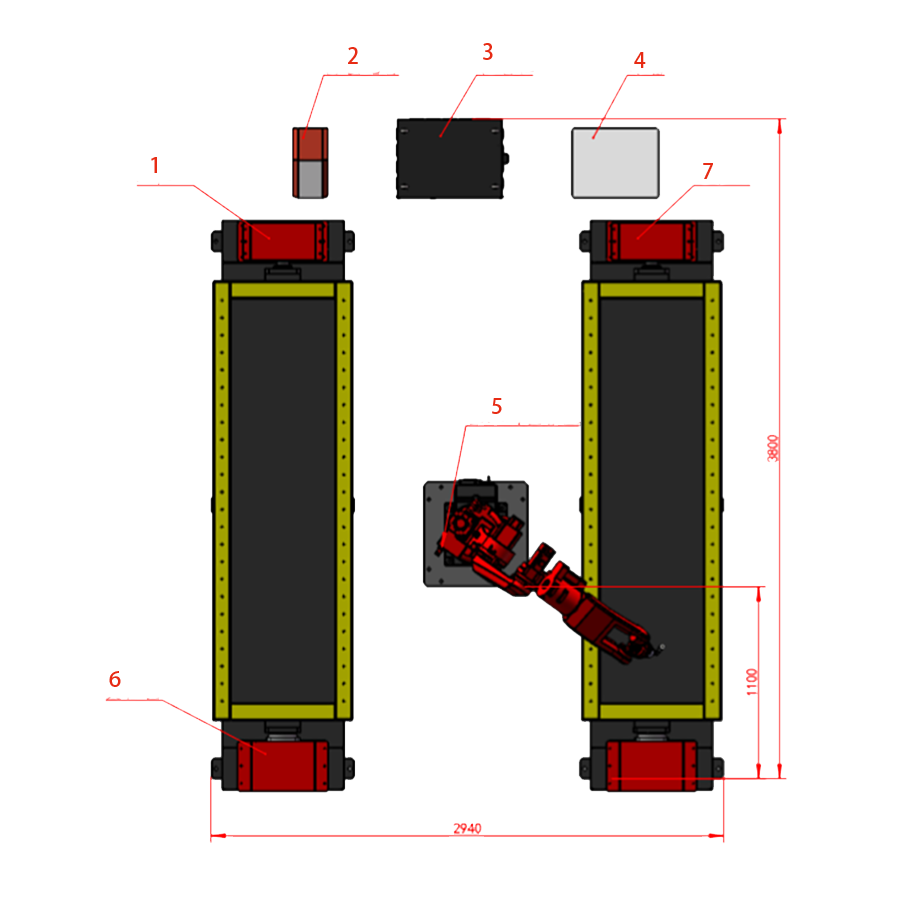
Honyen robot ark kebşirleýiş iş stansiýasy
1, 1-nji iş stansiýasy
2, Kebşirleýiş güýji çeşmesi
3, Robot dolandyryjy
4, Suw sowadyjy çiller
5, Honyen ark kebşirleme roboty, HY1006A-145
6, Positionerleşiji
7, 2-nji iş stansiýasy
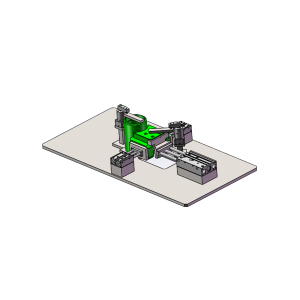
Elektrik polýus bölekleri
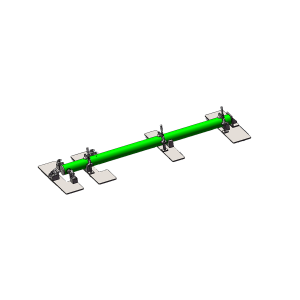
Elektrik polýus bölekleri 2
Robotly kebşirleýiş çözgütleri 1-nji düzüliş
Elektrik polýus bölekleri 3
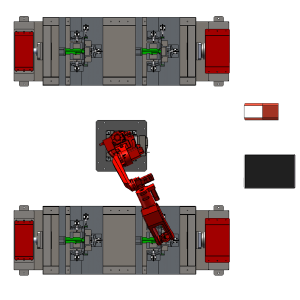
Robot kebşirleýiş çözgütleri 2-nji düzüliş
Robot kebşirleýiş çözgütleri 3-nji düzüliş
4. Robot bilen kebşirlemegiň çözgüdi I. Operator iş ýüküni 1-nji stansiýada ýükleýär we gysandan soň.Operator robot bron etmegiň başlangyç düwmesini basýar we robot awtomatiki kebşirlemäge başlaýar;
II.Operator iş böleklerini ýüklemek üçin 2-nji stansiýa gidýär.Iş bölegi ýüklenenden soň, Operator robot bron etmegiň başlangyç düwmesini 2 basýar we robotyň kebşirlemegine garaşýar;
III.Robot 1-nji stansiýada kebşirlemäni gutarandan soň, 2-nji stansiýanyň programmasyny awtomatiki ýerine ýetirýär;
Ⅳ.Soňra Operator 1-nji stansiýada Workpiece-i düşürýär we täze iş bölegini ýükleýär;
V. yzygiderli.
5. Robot çözgüdi enjamlaryň konfigurasiýasy
| Haryt | Model | Mukdar | Marka | Bellik | ||
| 1 | 1.1 | Robot bedeni | HY1006A-145 | 1 Set | Honyen | Şol sanda robot korpusy, dolandyryş kabineti, programmist öwretmek |
| 1.2 | Robot dolandyryş şkafy | 1 toplum | ||||
| 1.3 | Kebşirleýiş güýji Çeşmesi | 1 Set | Honyen | Megmeet kebşirleýji | ||
| 1.4 | suw çüýşesi | 1 Set | Honyen | |||
| 1.5 | Suw sowadyjy kebşirleýiş fakeli | 1 Set | Honyen | |||
| 2 | 1 Ok oky | HY4030 | 2 Set | Honyen | 2,5 m, 300kg ýük, 1.5KW bahaly çykyş güýji | |
| 3 | Elektrik dolandyryş stansiýasy | 2 Set | Honyen | |||
| 4 | Ulgam dizaýny, integrasiýa we programmirlemek | 1 Set | Honyen | |||
| 5 | Howpsuzlyk diwary | 1 Set | Honyen | Meýletin | ||
6. Esasy wezipe Kebşirlemegiň hilini we netijeliligini üpjün etmek üçin robot ulgamy öz-özüni goramak funksiýasy we ark kebşirleýiş bazasy bilen enjamlaşdyrylandyr.Esasy wezipeler aşakdakylar:
Asyl ýoly dowam etdiriň: galkan gazynyň akymy adaty bolmadyk ýagdaýynda, kebşirleýiş simleri sarp edilip, kebşirleýiş wagtynda wagtlaýyn togtadylanda, näsazlyklary düzedenden soň "kebşirlemegi dowam etdirmek" buýrugy gönüden-göni çagyrylyp bilner we robot kebşirlemegi awtomatiki usulda islendik ýerden togtadylan ýerine çenli dowam etdirip biler.
Näsazlygy ýüze çykarmak we çaklama: duýduryş ýüze çykandan soň, Robot dolandyryş enjamyndan maglumatlary alýar, kemçilik böleklerini çaklaýar we öz gezeginde ýokary kemçilik bölekleriniň sanawyny berýär, kompýuterde komponentleriň çalşylmagynyň we diagnozynyň yzygiderliligini görkezýär, bu ýerde maýatnik öwrediji sahypada görüp bolýar.Mundan başga-da, kompýuter robotdan işleýiş maglumatlary yzygiderli alyň, alnan maglumatlary derňäň, robotyň işleýşiniň kadalydygyny ýa-da ýokdugyny kesgitläň we ulanyjyny ýakyn wagtda ýüze çykjak näsazlyklary çözmäge çagyryň.
Çaknyşyklara garşy funksiýa: robot kebşirleýiş fakeli daşarky zatlar bilen çökse, robot çakyşmagyna garşy enjam kebşirleýiş fakelini we robot korpusyny goramak üçin işleýär.
Ekspert maglumatlar bazasy: programmada kebşirlemegiň zerur şertlerini düzmek bilen, bu ulgam kebşirleýiş tikişini we degişli kebşirleme parametrlerini sazlamagy awtomatiki usulda tamamlap biler.
Okatmak we programmirlemek: maýatnik öwretmek arkaly ýerinde programmirlemegi amala aşyryň.
Dokma kebşirlemek: kebşirleýiş döwründe robot diňe bir umumy swing kebşirleme tegelek görnüşini we Z görnüşini hem düşünip bilmeýär.Bu, kebşirleýiş güýji we kebşirleýiş ukyby bilen kebşirleýiş tikişiniň giňligini ýokarlandyrmak üçin, iş böleklerine görä müşderiniň swing kebşirleýiş funksiýasyny durmuşa geçirmäge kömek edýär.
Ekranyň ýagdaýy: robot, programmanyň işleýiş ýagdaýy, kebşirleýiş prosesiniň parametrleriniň üýtgemegi, ulgamyň parametrleriniň üýtgemegi, robotyň häzirki ýagdaýy, ýerine ýetiriş taryhy ýazgylary, howpsuzlyk duýduryşlary, duýduryş ýazgylary we ş.m. ýaly gulak öwretmek arkaly tutuş robot ulgamynyň işleýiş ýagdaýyny görkezip biler. robot ulgamynyň ýagdaýyna öz wagtynda düşüniň we problemalaryň öňüni alyň.
Giriş / çykyş faýllary: robot ulgamyndaky faýllar we programma faýllary, robot dolandyryjysynyň içinde SD kartada saklanyp bilner we daşarky enjamlara hem saklanyp bilner.Oflayn programma üpjünçiligi tarapyndan ýazylan programmalar hem Robot kontrolleýjisine ýüklenip bilner, Bu müşderilere ulgam faýllaryny yzygiderli ätiýaçlandyrmaga kömek edýär, Robot ulgamynda näsazlyk ýüze çykansoň, bu ätiýaçlyk robotyň meselelerini çözmek üçin dikeldilip bilner.
7, Enjamlaryň tanyşdyrylyşy HY1006A-145, akylly funksiýaly ýokary öndürijilikli robot.Gaz bilen goralýan kebşirlemek we kesmek üçin amatly.Aýratynlyklary ýeňil agram we ykjam gurluşdyr.
Arka kebşirleýiş programmalary üçin Honyen ýeňil agramy we ykjam goly üstünlikli dizaýn etdi, bu diňe bir asyl ygtybarlylygy üpjün etmän, eýsem ajaýyp çykdajy ýerine ýetirýär.
Honyen, robotyň hereket tizligini we takyklygyny ýokarlandyryp, operatoryň gatyşmagyny azaldyp we gaz bilen goralýan kebşirlemek we kesmek üçin iş netijeliligini ýokarlandyryp biljek iň ösen sero tehnologiýasyny kabul edýär.
| Ok | Loadüklemek | Gaýtalama | Kuwwatlylygy | Daşky gurşaw | Agramy | Gurnama |
| 6 | 10 | 0.08 | 6.5KVA | 0 ~ 45 ℃ 20 ~ 80% RH (Çyglylyk ýok) | 300 kg | / Er / potolok |
| Hereket aralygy J1 | J2 | J3 | J4 | J5 | J6 | IP derejesi |
| ± 170 ° | + 80 ° ~ -150 ° | + 95 ° ~ -72 ° | ± 170 ° | + 115 ° ~ -140 ° | ± 220 ° | IP54 / IP65 (bilek) |
| Iň ýokary tizlik J1 | J2 | J3 | J4 | J5 | J6 | |
| 158 ° / s | 145 ° / s | 140 ° / s | 217 ° / s | 172 ° / s | 500 ° / s |
Doly hytaý operasiýa interfeýsi we doly klawiatura amallary bilen iňlis diline üýtgedilip bilner
I / O interfeýsi, Modbus, Ethernet we ş.m. ýaly dürli aragatnaşyklary goldaň.
Birnäçe robot we beýleki daşarky enjamlar bilen baglanyşyklary goldaň
Uly göwrümli reňkli duýgur ekran
Çaknyşyklara garşy enjam, robot goluny goraýar we päsgelçiligi azaldýar
“Robot Motion” dolandyryşy iň amatly ýoly meýilleşdirýär
Gurlan funksiýalaryň ýüzlerçesi we funksiýalary programmirlemegi ýönekeýleşdirýär
SD karta arkaly maglumatlaryň ätiýaçlyk nusgasyny almak we göçürmek amatly
Positionerleşiji

Iş böleklerini aýlamak, robot bilen hyzmatdaşlyk etmek, kebşirlemek üçin oňat ýagdaýa gelmek we kebşirlemegiň gowy ýerine ýetirilmegi üçin ulanylýan “Honyen Head-guýruk” goşa goldaw pozisiýasy
Kebşirleýiş güýji çeşmesi

Megmeet Ehave cm 500h / 500/350 seriýaly doly sanly senagat agyr ýük * CO2 / MAG / MMA akylly kebşirleýji maşyn
8. Gurmak, işe girizmek we okuw
Getirilmezden ozal, robot ulgamy gurlar we kompaniýamyzda doly işleýär.Müşderi synag kebşirlemek we eltip bermezden ozal kabul etmek üçin böleklerini kompaniýamyza iberer.Kabul ediş wagtynda Müşderiniň operatorlary başlangyç tehniki taýýarlygy alarlar.
Gurnama meýilnamasy we tehniki talaplar gurulmazdan 15 gün öň müşderä tabşyrylar we müşderi talaplara laýyklykda öz wagtynda taýýarlyk görer.Ulanyjynyň sahypasynda ulgam gurnamak we işe girizmek üçin kompaniýamyz inersenerleri iberer.Müşderiniň işe girizilmegini ýeterlik derejede üpjün etmegi şerti bilen, programmirlemegiň işe girizilmeginden başlap, köpçülikleýin synag önümçiligine çenli wagt 10 günden geçmeli däldir.Kompaniýamyz, robot ulgamy programmirleme, müşderiler üçin işlemek we hyzmat etmek boýunça ulanyjylary taýýarlaýar we diňleýjiler kompýuteriň esasy bilimlerine eýe bolmalydyrlar.
Gurmak we işe girizmek wagtynda müşderi göteriji enjamlar, forklift, kabeller, täsir burawy we ş.m. ýaly zerur gurallary üpjün etmeli we düşürmek we gurnamak wagtynda wagtlaýyn kömek bermeli.
Operatorymyza ýol görkezmek, gurnamak, enjamlary işe girizmek we taýýarlamak üçin kompaniýamyz jogapkärdir.Bejeriş we işlemek üçin kompaniýamyz jogapkärdir.Operator enjamlary özbaşdak dolandyrar we goldar.Okuwyň mazmuny: enjamlaryň gurluşy ýörelgesi, umumy elektrik näsazlyklaryny düzetmek, esasy programmirleme görkezmeleri bilen tanyşdyrmak, adaty bölekleriň programmirleme endikleri we programmirleme usullary, enjamlaryň işleýiş paneliniň girizilmegi we ätiýaçlyk çäreleri, enjamlaryň işleýiş amaly we ş.m.
9. Barlaň we kabul ediň
Öňünden kabul etmek iki tarapyň hem degişli işgärleriniň gatnaşmagynda kompaniýamyzda amala aşyrylýar.Öňünden kabul edilende, iş bölekleri müşderi tarapyndan berlen iş böleginiň takyklygyna laýyklykda barlanar, Diňe ökde hünärli iş bölegi kebşirlener we kabul edilmezden ozal synag hasabaty berler.Gutarandan soň, robot gowşurylar.Öňünden kabul edilmegini üpjün etmek üçin adaty önümçilik üçin 3 iş bölegi berler.
10.Daşky gurşaw talaplary Howpsuzlyk talaplary: ulanyjylar tarapyndan ulanylýan gaz we ätiýaçlyk şaýlary degişli milli standartlara laýyk gelmelidir.
Howa çeşmesi açyk howada, otdan 15 metr uzaklykda, gazdan we kisloroddan 15 metr uzaklykda bolmaly däldir.Howa çeşmesi gowy howa çalşygy şertlerini saklamaly we şemaldan salkyn ýerde bolmaly.
Robot ulanmazdan ozal ähli gaz zynjyrlary barlanmalydyr.Howanyň syzmagy bar bolsa, ýalňyşlygyň bolmazlygy üçin ony abatlamaly.
basyşy sazlanda we gaz silindrini üýtgedende, operatoryň elinde ýag maddalary bolmaz.
daşky gurşawyň çyglylygy: umuman alanyňda, daşky çyglylyk 20% ~ 75% RH (kondensasiýa bolmadyk ýagdaýynda);Gysga möhletli (1 aýyň içinde) 95% RH-den az (kondensasiýa bolmazdan).
gysylan howa: 4,5 ~ 6.0 kgf / cm2 (0.45-0.6mpa), süzgüç ýagy we suw, ≥ 100L / min
Esasy: iň az beton berkligi C25, binýadyň iň pes galyňlygy 400 mm
yrgyldy: yrgyldy çeşmesinden daşda duruň
tok üpjünçiligi: ähli öndürilen elektrik we elektron enjamlarynyň elektrik üpjünçiligi, elektrik üpjünçiliginiň esasy ýerini üpjün etmek üçin 50Hz (± 1) we 380V (± 10%) üç fazaly AC naprýa .eniýesini kabul edýär.
Müşderiler tarapyndan hödürlenýän saýt hyzmatlarynda:
gowşurylmazdan ozal ähli zerur taýýarlyklar, mysal üçin esas, zerur kebşirleýiş işleri, kömekçi gurallary düzetmek we ş.m.
müşderiniň ýerinde düşürmek we daşamak.
11. Kepillik we satuwdan soň hyzmat Kebşirleýiş çeşmesiniň kepillik möhleti 12 aý.
Robot korpusynyň kepillik möhleti 18 aý.
Adaty ulanylanda näsazlyk ýa-da zeper ýeten ýagdaýynda we enjamlar kepillik möhletinde bolsa, kompaniýamyz mugt EXW böleklerini bejerip ýa-da çalşyp biler (sarp ediş materiallary, tehniki hyzmat önümleri, howpsuzlyk turbalary, görkeziji çyralar we kompaniýamyz tarapyndan ýörite bellenen beýleki sarp ediş materiallary muňa girmeýär).
Kepilliksiz gowşak bölekler üçin kompaniýamyz adaty hyzmat möhletini we gowşak bölekleriň üpjünçilik bahasyny wada berýär we enjamlaryň bäş ýyla çenli durnukly üpjünçilik kanaly bar.
Kepillik möhletinden soň, kompaniýamyz ömürlik tölegli hyzmat bermegi we giňişleýin tehniki goldawy we zerur enjam enjamlaryny üpjün etmegi dowam etdirer.
12. Goşmaça resminamalar Gurnama çyzgylary: enjamlaryň binýadynyň çyzgylary we enjamlary gurnamak çyzgylary
◆ dizaýn çyzgylary: armatura we enjam çyzgylary
Ual Gollanma: enjamlary işletmek boýunça gollanma, tehniki hyzmat boýunça gollanma we robot bilen işlemek boýunça gollanma
Ories garnituralar: gowşuryş sanawy, şahadatnama we kepillik kartasy.



