Metbugat enjamy üçin 4 ok belgili robot



Önümiň tanyşdyrylyşy
Marka pudagyny döwrebaplaşdyrmak we özgertmek üçin hakyky islegi göz öňünde tutup, ýokary çeýeligi we ýönekeý dolandyryş 4-Okly möhürleme işleýiş roboty dizaýn edildi we işlenip düzüldi.
Dört ok möhürleýji robot dört ok dizaýnyny, ykjam görnüşi, kiçi göwrümi, ýeňil agramyny kabul edýär, argon ark kebşirlemekde, palletirlemekde, işlemekde, möhürlemekde we beýleki meýdanlarda giňden ulanylýar, durnukly işlemegi, takyk kebşirlemegi tamamlap biler. Dört oky gysýan manipulýator möhürleme amalyny kiçijik bir ýerde çeýe ýerine ýetirip biler we gurmak we düzeltmek ýönekeý we amatly.
Esasy bölekler
Highhli ýokary hilli hytaý marka bölekleri
Servo Motor
Sero motorynyň markasy, çalt reaksiýanyň, uly torkyň başlangyç momentiniň inersiýa gatnaşygy we ş.m. artykmaçlyklary bolan Hytaý markasy Rukingdir. Öňe we yza tizlenme we tizlenme operasiýasyny amala aşyrýan we gysga wagtyň içinde artykmaç ýüklere birnäçe gezek çydap bilýän agyr iş şertlerine çydap biler.
LNC gözegçilik ulgamy
“Yooheart” roboty programmirlemegi kabul edýär. Işlemekde ýönekeý we amatly we çeýe. “Yooheart” roboty, çylşyrymly programmalaryň dürli görnüşlerinde ulanylyp bilinýän uzakdan programmirlemegi hem goldaýar.
ROBOT BODY
Beden, ereýän metal emele gelmegine ýokary basyş etmek üçin galyndy boşlugyny ulanyp, ýokary dykyzlygy, güýçli berkligi emele getirýär, öz agramy has ýeňil bolýar.
Jikme-jik görkez
Preokary takyklyk
Çalt herekete jogap
Bu dereje öňde barýar
ýurtda
Gurluşy ýönekeý
Saklamak aňsat
Has tygşytly
Speedokary tizlik we durnuklylyk
Takyk ýol
Ajaýyp möhürleme çözgütleri
Robot parametri
| Taslama | Spesifikasiýa | Taslama | Spesifikasiýa | Ok | Hereket aralygy | Iň ýokary tizlik | Boş Dia |
| Ok | 4 | Temperatura | 0 ℃ -45 ℃ | J1 | ± 170º | 190º / s | —— |
| Potensial | 3.7KVA | Çyglylyk | 20-80% RH (Çyglylyk ýok) | J2 | + 10º ~ + 125º | 120º / s | —— |
| Agram | 170KG | Wibrasiýa | 4.9M / S Under | J3 | + 10º ~ -95º | 120º / s | —— |
| Iň köp ýük | 10KG | Beýlekiler | Lamangyjy we poslaýjy gazlar we suwuklyklar ýok, elektrik ses çeşmelerinden daşda duruň | J4 | ± 360º | 200º / s | —— |
| Iň köp iş aralygy | 140CM | Gaýtalama | ± 0.08mm | IP derejesi | IP65 | Gurnama | Ounder |
Robot programmasy
Gyzgyn ekstruziýa önümini ýüklemek we düşürmek
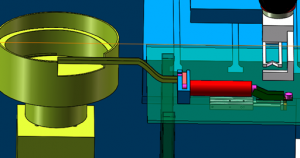
Bu taslama esasan mis möhürlemek üçin. Gyzyl urmak prosesi gyzgyn ekstruziýa prosesi. Gyzyl urlanda, metal material belli bir temperaturada gyzdyrylýar we gyzdyrylan galypda goýulýar. Basyş maşynynyň guralynyň bir gezeklik hereketinden soň, möhür basýan bölekleriň zerur ululygyny, görnüşini we gowy mehaniki aýratynlyklaryny almak üçin metal material plastmassa deformasiýa edilýär. Müşderi gyzyl zarba urýan metal iş bölegini ýüklemek we düşürmek üçin “Yooheart 4-ok” robotyny kabul edýär
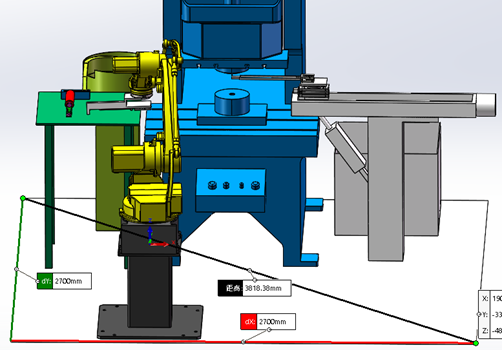
Integrasiýa çözgüdi
Taslama bir gysyjy pressden, “Yunhua 4-ok” 10kg robotdan, ikinji derejeli ýerleşdiriş gurallaryndan, silindr kombinasiýasy boş enjamdan we ş.m. Wagtyň urulmagy, bahalandyrylan ýük we iş ýagdaýy ýaly belli maglumatlar, HY1010B-140 bahalandyrylan parametr diapazonynda.


Önümçilik prosesi
Hookarlandyrmak üçin el bilen iýmitlendirmek ration yrgyldy plastinkasy bilen iýmitlendirmek feed Iýmitlendiriş enjamynyň ýyladylmazdan ozal ýerleşişi, häzirki turba gyzdyrylyşy ▶ ikinji derejeli ýerleşdiriş enjamynyň ýerleşişi ▶ robotyň gysylmagy ▶ pyçak basmak ▶ silindr iýmitlendiriji enjamyň çykarylyşy
Iýmitlendirmek we enjamyň ýerleşdirilişiniň gysgaça mazmuny
Wibrasiýa plastinkasyny el bilen iýmitlendiriň yr Wibrasiýa plastinkasy, häzirki ýyladyş turbasynyň material üpjünçiligi secondary Ikinji ýerleşiş guraly robot gysgyçly ýerleşişdir
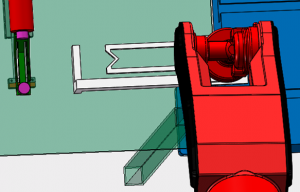
Enjamyň gysylmagyna syn
Robot zarba emele getirmek üçin ýerleşýän mis materialyny gysar
Satuwdan soň hyzmat
Hyzmatdan soň hiç haçan senagat robotlaryny ulanmadyk bolsaňyz we ulanyş wagtyňyzdaky meseleleri çözseňizem, amaly öwrenmäge kömek ederis.
Ilki bilen, käbir robot maglumatlaryna düşünmäge kömek etmek üçin degişli gollanmalary hödürläris.
Ikinjiden, öwrediji wideolaryň bir toparyny hödürläris. Bu wideolary sim, ýönekeý programmirlemekden çylşyrymly programmalary tamamlamak üçin ädimme-ädim yzarlap bilersiňiz. Ividagdaý şertlerinde size kömek etmegiň iň täsirli usulydyr.
Iň soňkusy, 20-den gowrak tehnik bilen onlaýn hyzmat ederis. Soraglaryňyz bar bolsa, islän wagtyňyz biziň bilen habarlaşyp bilersiňiz we derrew kömek ederis.


RFQ
S: Bu işçiler üçin ygtybarlymy?
A. Elbetde, roboty saýlamak we ýerleşdirmek üçin ulanmagyň artykmaçlyklaryndan biri işçileri şikeslerden goramakdyr. Bir işçi 5 ~ 6 birlik CNC enjamyny dolandyryp biler.
S: robot ýüklemek we düşürmek haýsy önümi ulanyp biler?
J: Her bir robot maşyn ýükleýjisi, enjamyňyza we önümiňize laýyk gelýän iň soňky gurallar bilen enjamlaşdyrylyp bilner. Örän takyk we bölegi seresaplylyk bilen ýerine ýetirmäge ukyplylygy bar.
S: Roboty ýüklemek we düşürmek üçin gol gurallarynyň diňe bir ujuny ulanyp bolarmy?
A. Senagat robot goly programmany üýtgedip biler we gysgyçly gysgyç, akylly ammarda çalt üýtgeşmeler, düzediş tizligi, işgärleriň zerurlygyny aradan aýyrmak, şeýle hem okuw wagty çalt öndürilip bilner.
S: Roboty ýüklemegiň we düşürmegiň başga bir peýdasy barmy?
A. Iş böleginiň hilini ýokarlandyrmak Daş görnüşler: robot awtomatlaşdyrylan önümçilik liniýalary, iýmitlenmekden, gysmakdan, bütinleý robotlar bilen kesmekden, aralyk baglanyşyklary azaltmak üçin bölekleriň hili ep-esli gowulaşýar, esasanam has owadan ýer.
S: Roboty ýüklemek we düşürmek üçin doly çözgütler berip bilersiňizmi?
A. elbetde, muny dilerimiz bilen bilelikde edip bileris.