Awtoulag pudagy innowasiýa bilen manydaş, komponent önümçiliginde yzygiderli takyklygy, tizligi we ygtybarlylygy talap edýär. Kritiki awtoulag bölekleriniň arasynda, işleýiş ulgamlary, esasanam işleýiş turbalary - ulagyň işleýşinde, zyňyndylara gözegçilikde we sesiň peselmeginde möhüm rol oýnaýar. Öndürijiler berk hil ülňülerine we önümçilik maksatlaryna ýetmäge çalyşýarka, kebşirleýiş robotlary egzoz ulgamlaryny ýasamakda aýrylmaz gural hökmünde ýüze çykdy. Bu makala, öňdebaryjy ýerleşiş enjamlary bilen birleşdirilen robot kebşirleýiş ulgamlarynyň nähili öwrenilýändigini öwrenýäraýlaw egriji pozisiýalarweýöriteleşdirilen gurallar, awtoulag egzoz turbalarynyň önümçiligini rewolýusiýa edýär, netijeliligi, yzygiderliligi we önümiň hilini görlüp-eşidilmedik derejä çykarýar.
1. Egzoz turbalaryny öndürmegiň çylşyrymlylygy
Egzoz turbalary ýokary temperatura, poslaýjy gazlar we mehaniki yrgyldylar ýaly aşa şertlere sezewar edilýär. Bu kynçylyklara garşy durmak üçin adatça poslamaýan polatdan ýa-da alýuminiz polatdan ýasalýar we çylşyrymly geometriýalarda bökdençsiz, howa geçirmeýän kebşirlemegi talap edýär. Adaty el bilen kebşirlemek prosesi köplenç gözenek, doly däl birleşmek ýa-da ýoýulmak ýaly kemçiliklere sebäp bolýan şeýle programmalarda yzygiderliligi saklamak üçin göreşýär.
Kebşirleýiş robotlary, bu çylşyrymlylyklary çözmekde has ýokarydyr. Köp okly artikulýasiýa bilen enjamlaşdyrylan we takyk ýerleşiş ulgamlary bilen sinhronlaşdyrylan, egzoz ulgamlarynyň bitewiligini üpjün etmek üçin egrilen ýüzlerde, flaneslerde we bogunlarda kemsiz kebşirleýärler.
2. Hereketde robot kebşirlemek: Egzoz turbalary üçin esasy programmalar
2.1 Turbadan-flanes we turbadan-kebşirleýji kebşirlemek
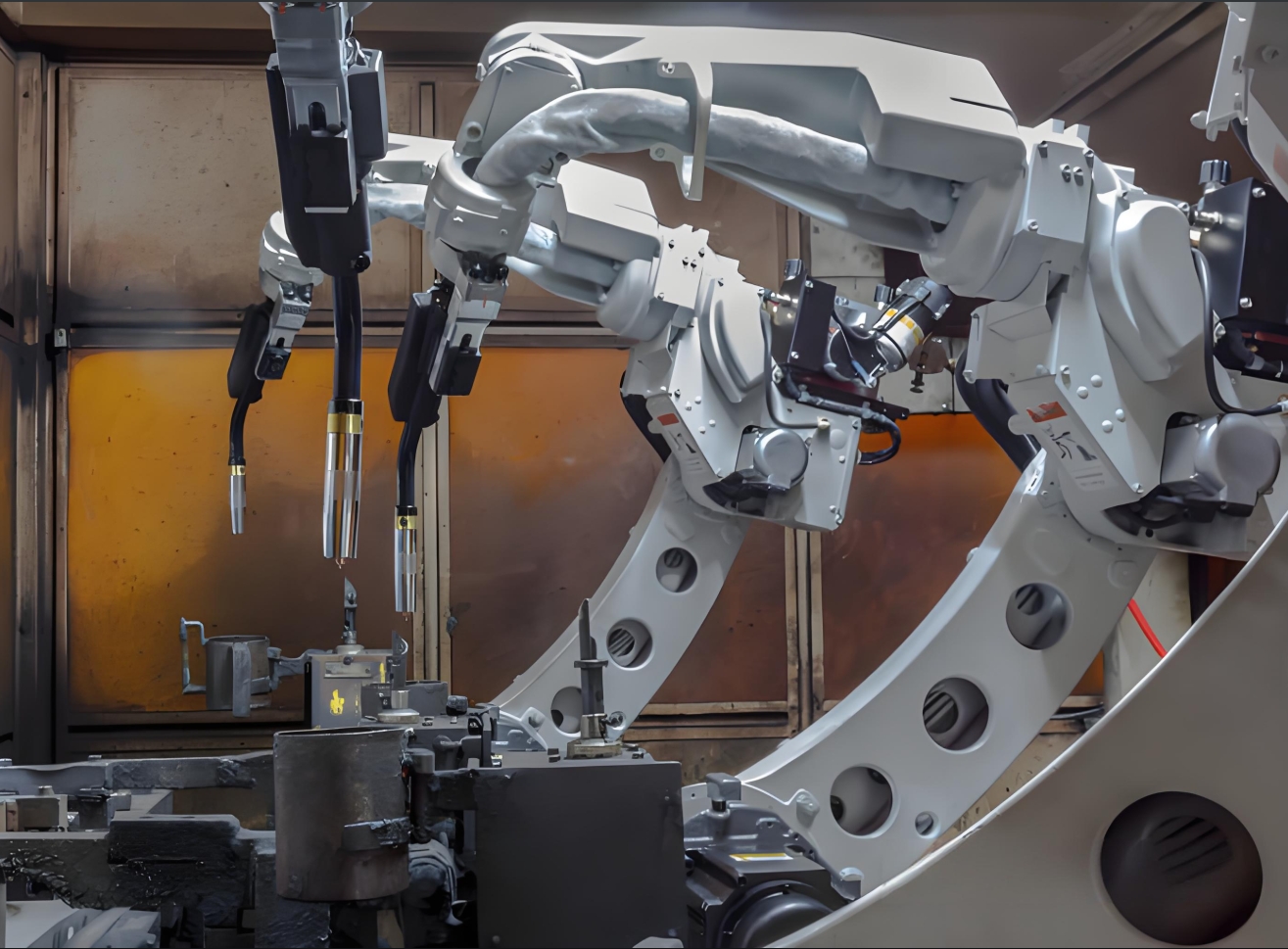
Egzoz ulgamlary turbalar, katalitik öwrüjiler, rezonatorlar we sazlaýjylar ýaly birnäçe komponentden durýar. Robot kebşirleýiş ulgamlary turbalaryň flaneslere ýa-da pürsleý jaýlara birikmegini awtomatlaşdyrýar, birmeňzeş aralaşmagyny üpjün edýär we ýylylyga täsir edýän zolaklary azaldýar (HAZ). Mysal üçin, a6 okly robotTurbanyň daş-töwereginde hereket edip, iň amatly fakel burçlaryny we hatda konturly ýüzlerde-de syýahat tizligini saklap biler.
2.2 Inçe diwarly komponentler üçin lazer kebşirlemek
Döwrebap gaz turbalarynda köplenç güýji saklamak bilen agramy azaltmak üçin inçe diwarly dizaýnlar bar. Lazerli kebşirleýji robotlar, ýokary energiýa dykyzlygy we dar kebşirleýiş tikişleri bilen, çişmeginiň öňüni alýar we material aýratynlyklaryny saklaýar. Bu, takyklygy birinji orunda durýan poslamaýan polatdan işleýän ulgamlar üçin has amatlydyr.
2.3 Galyň bogunlar üçin köp geçişli kebşirlemek
Söwda ulaglaryndaky agyr işleýiş ulgamlary üçin, robot gazly metal kebşirleme (GMAW) ulgamlary galyň diwarly turbalar bilen ýaýlaryň arasynda berk bogunlary gurmak üçin köp geçişli kebşirlemeleri ýerine ýetirýär. Uýgun kebşirleme algoritmleri material üýtgemelerini ýerleşdirmek üçin parametrleri hakyky wagtda sazlaýar.
3. Rotary egirme pozisiýalary bilen çeýeligi ýokarlandyrmak
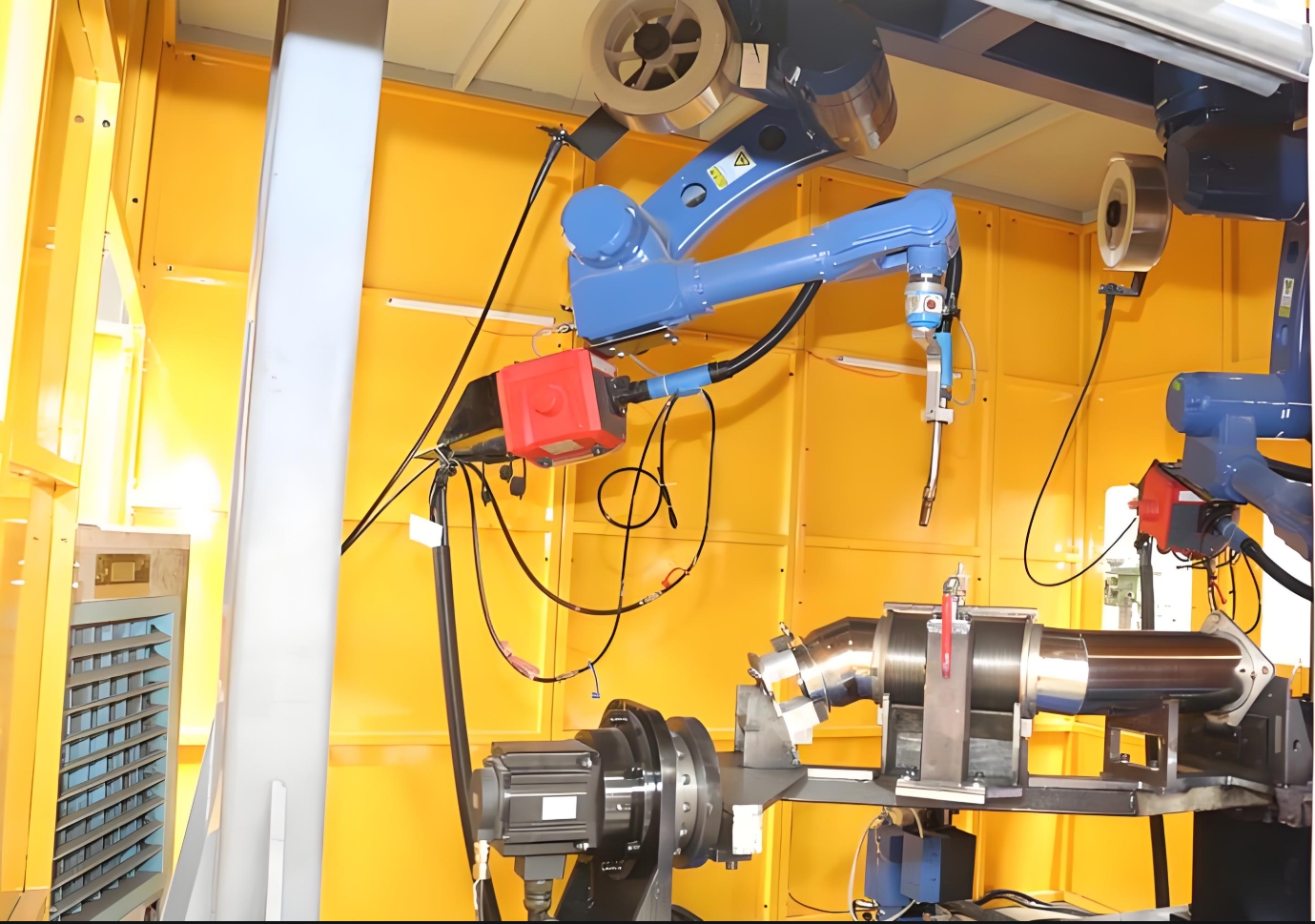
Robot kebşirleýiş öýjüginiň netijeliligi, robot bilen iş böleginiň arasynda üznüksiz utgaşdyrylmaga baglydyr.Aýlanýan egriji pozisiýalarkebşirleýiş wagtynda 360 dereje aýlanmaga we egzoz turbalarynyň egilmegine mümkinçilik berýän bu işde möhüm ähmiýete eýe. Peýdalary şulary öz içine alýar:
- Iň amatly bilelikdäki elýeterlilik: Positionerleşýän, robot programmirlemesini ýönekeýleşdirýän we aýlaw wagtyny azaldýan kebşirleýiş tikişini tekiz ýa-da keseligine görkezmek üçin turbany üýtgedýär.
- Azaldylmagy: Iş bölegini dinamiki sazlamak bilen, robot boş wagty azaldyp, bir gurnamada birnäçe kebşirläp biler.
- Gowulaşan ergonomika: Operatorlar robot kebşirlän mahaly komponentleri ýükleýärler / düşürýärler, iň ýokary geçirijiligi.
Mysal üçin, goşa stansiýaly pozisiýa bir turbany kebşirlemäge mümkinçilik berýär, beýlekisi ýüklenende, üznüksiz önümçilige ýetýär.
4. Takyk armatura: yzygiderliligiň diregi
Custöriteleşdirilenkebşirleýji enjamlarRobot kebşirleýiş wagtynda egzoz komponentlerini takyk deňleşdirmek üçin möhümdir. Esasy dizaýn pikirleri:
- Basyş mehanizmleri: Pnewmatik ýa-da gidrawliki gysgyçlar, turbalary, flanesleri we ýaýlary örtmezden howpsuz.
- Modullyk: Çalt üýtgeýän enjamlar garyşyk görnüşli önümçilik üçin amatly dürli turba diametrlerini ýa-da konfigurasiýalaryny ýerleşdirýär.
- Malylylyk dolandyryşy: Heatylylyga çydamly materiallardan ýasalan gurallar, kebşirleýiş ýaýlaryna uzak wagtlap täsir edip bilýär.
Ösen enjamlar, kebşirleme başlamazdan ozal komponentleriň ýerleşdirilişini barlamak üçin datçikleri birleşdirýär, gabat gelmeýän kemçilikleri aradan aýyrýar.
5. Netijelilik mukdaryny kesgitlemek
Egzoz turbalary öndürmekde robot kebşirleýiş ulgamlarynyň kabul edilmegi ölçenip boljak gowulaşmalary üpjün edýär:
- Sikl wagtynyň azalmagy: Robotly MIG kebşirleýji, elde kebşirlemek üçin 180+ sekunt bilen deňeşdirilende 60 aýlawda kebşirläp biler.
- Higherokary iş wagty: Robotlar minimal iş wagty bilen 24/7 işleýär we ýyllyk önümçiligini 30-50% ýokarlandyrýar.
- Material tygşytlamak: Takyk parametr gözegçiligi, sarp edilýän çykdajylary 15–20% azaldyp, dökülmegi we gaýtadan işlemegi azaldýar.
Mysal üçin, Tier-1 awtoulag üpjün edijisi aGeçirijiniň 40% ýokarlanmagyEgzoz ýygnamak üçin sinhron pozisiýalar bilen robot öýjükleri ýerleşdirenden soň.
6. Hiliň awtoulag standartlaryna ýokarlanmagy
Robot kebşirlemek IATF 16949 ýaly awtoulag hiliniň görkezijilerine laýyk gelmegini üpjün edýär:
- Gaýtalama: Robotlar kebşirleýiş ýollaryny ± 0,1 mm takyklyk bilen köpeldýär, adamyň üýtgemegini ýok edýär.
- Näsaz kesgitlemek: Toplumlaýyn görüş ulgamlary ýa-da ark gözegçilik datçikleri derrew düzedişlere sebäp bolup, orta prosesdäki näsazlyklary ýüze çykarýarlar.
- Resminamalar: Awtomatlaşdyrylan ulgamlar, barlaglar we ýatlamalar üçin möhüm yzarlanylýan kebşirleýiş ýazgylaryny döredýär.
Kebşirden soňky gözlegler robot ulgamlarynyň gözenekliligi we döwülme derejesini el usullary bilen deňeşdirilende 90% -den azaldýandygyny görkezýär.
7. Durnuklylyk we geljekki tendensiýalar
Awtoulag öndürijileri durnuklylygy has ileri tutýarlar. Robot kebşirlemek bu çalşygy goldaýar:
- Energiýa sarp edilişini azaltmak: Netijeli arka wagty we optimal hereket ýollary güýç sarp edişini peseldýär.
- Galyndylary azaltmak: Has ýokary hasyl derejesi galyndylary azaldýar.
- Lighteňilleşdirmek: Takyk kebşirlemek, çydamlylygy bozmazdan ösen, inçe materiallary ulanmagy aňsatlaşdyrýar.
Öňe seredip,AI bilen işleýän kebşirleýiş robotlaryşol bir wagtyň özünde, täze materiallar üçin parametrleri öz-özüni optimizirlemek üçin maşyn öwrenişini güýçlendirerbilelikdäki robotlar (kobotlar)operatorlara kiçi partiýa önümçiliginde kömek eder.

Netije
Awtoulag tükenik ulgamyny öndürmekde ýokary derejeli ýerlerde, akylly pozisiýalar we enjamlar bilen güýçlendirilen kebşirleýiş robotlary takyk in engineeringenerçiligiň iň ýokary derejesini görkezýär. Çylşyrymly kebşirleýiş meselelerini awtomatlaşdyrmak arkaly bu ulgamlar öndürijilere has çalt sikl wagtlaryny, ýokary hilli we ulaldylan önümçilige ýetmäge mümkinçilik berýär. Egzoz zyňyndy düzgünleri berkidilende we ulag dizaýnlary ösüp barýarka, robot kebşirleýiş tehnologiýasy innowasiýalaryň özeni bolup galar we awtoulag pudagyny has akylly we arassa geljege alyp barar.
Senagat robot öndürijileri üçin, gaz turbalarynyň goşundylarynda bu mümkinçiliklere ünsi çekmek diňe bir tehniki tejribäni görkezmek bilen çäklenmän, awtoulag önümçiliginiň kämilligini ýokarlandyrmakda çözgütlerini möhüm hyzmatdaşlar hökmünde görkezýär.
Iş wagty: Mart-21-2025



